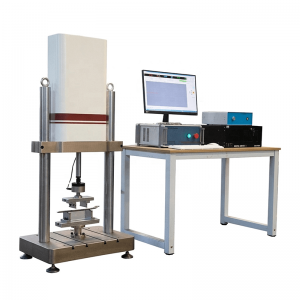
ພາກສະຫນາມຄໍາຮ້ອງສະຫມັກ
ເຄື່ອງທົດສອບຄວາມເຫນື່ອຍລ້າຂອງ electro-hydraulic servo dynamic (ເອີ້ນວ່າເຄື່ອງທົດສອບ) ສ່ວນໃຫຍ່ແມ່ນໃຊ້ເພື່ອທົດສອບຄຸນລັກສະນະແບບເຄື່ອນໄຫວຂອງໂລຫະ, ບໍ່ແມ່ນໂລຫະແລະວັດສະດຸປະສົມໃນອຸນຫະພູມຫ້ອງ (ຫຼືອຸນຫະພູມສູງແລະຕ່ໍາ, ສະພາບແວດລ້ອມ corrosive).ເຄື່ອງທົດສອບສາມາດເຮັດການທົດສອບດັ່ງຕໍ່ໄປນີ້:
ການທົດສອບ tensile ແລະ compression
ການທົດສອບການຂະຫຍາຍຕົວຂອງຮອຍແຕກ
ລະບົບການຄວບຄຸມ servo ວົງປິດທີ່ປະກອບດ້ວຍເຄື່ອງຄວບຄຸມໄຟຟ້າ, servo valve, load sensor, displacement sensor, extensometer ແລະຄອມພິວເຕີສາມາດຄວບຄຸມຂະບວນການທົດສອບໄດ້ຢ່າງຖືກຕ້ອງແລະອັດຕະໂນມັດ, ແລະອັດຕະໂນມັດວັດແທກຕົວກໍານົດການທົດສອບເຊັ່ນ: ຜົນບັງຄັບໃຊ້ການທົດສອບ, ການເຄື່ອນຍ້າຍ, ການຜິດປົກກະຕິ, ແຮງບິດ, ແລະ. ມຸມ.
ເຄື່ອງທົດສອບສາມາດຮັບຮູ້ຄື້ນ sine, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມມົນ, ຄື້ນແຂ້ວເລື່ອຍ, ຄື້ນຕ້ານ sawtooth, ຄື້ນກໍາມະຈອນ ແລະຮູບແບບຄື້ນອື່ນໆ, ແລະສາມາດເຮັດການທົດສອບຄວາມເມື່ອຍລ້າ, ບີບອັດ, ບິດ, ຮອບວຽນຕໍ່າ ແລະຮອບວຽນສູງ.ມັນຍັງສາມາດຕິດຕັ້ງອຸປະກອນການທົດສອບສິ່ງແວດລ້ອມເພື່ອເຮັດສໍາເລັດການທົດສອບການຈໍາລອງສິ່ງແວດລ້ອມຢູ່ໃນອຸນຫະພູມທີ່ແຕກຕ່າງກັນ.
ເຄື່ອງທົດສອບມີຄວາມຍືດຫຍຸ່ນແລະສະດວກໃນການດໍາເນີນງານ.ການຍົກ beam ເຄື່ອນຍ້າຍ, locking, ແລະການຍຶດຕົວຢ່າງແມ່ນສໍາເລັດໂດຍການດໍາເນີນງານປຸ່ມ.ມັນໃຊ້ເທກໂນໂລຍີຂັບ servo ໄຮໂດຼລິກທີ່ກ້າວຫນ້າເພື່ອການໂຫຼດ, ເຊັນເຊີການໂຫຼດແບບເຄື່ອນໄຫວທີ່ມີຄວາມແມ່ນຍໍາສູງແລະເຊັນເຊີການເຄື່ອນທີ່ magnetostrictive ຄວາມລະອຽດສູງເພື່ອວັດແທກຜົນບັງຄັບໃຊ້ຂອງຕົວຢ່າງ.ມູນຄ່າແລະການເຄື່ອນຍ້າຍ.ລະບົບການວັດແທກແລະການຄວບຄຸມດິຈິຕອນທັງຫມົດຮັບຮູ້ການຄວບຄຸມ PID ຂອງຜົນບັງຄັບໃຊ້, ການຜິດປົກກະຕິແລະການເຄື່ອນຍ້າຍ, ແລະການຄວບຄຸມແຕ່ລະຄົນສາມາດປ່ຽນໄດ້ຢ່າງລຽບງ່າຍ., ຊອບແວທົດສອບເຮັດວຽກຢູ່ໃນສະພາບແວດລ້ອມ WINDOWS XP/Win7 ຈີນ, ມີຫນ້າທີ່ປະມວນຜົນຂໍ້ມູນທີ່ມີປະສິດທິພາບ, ເງື່ອນໄຂການທົດສອບແລະຜົນການທົດສອບຈະຖືກບັນທຶກ, ສະແດງແລະພິມໂດຍອັດຕະໂນມັດ.ຂະບວນການທົດສອບໄດ້ຖືກປະສົມປະສານຢ່າງສົມບູນເຂົ້າໃນການຄວບຄຸມຄອມພິວເຕີ.ເຄື່ອງທົດສອບແມ່ນລະບົບການທົດສອບທີ່ມີປະສິດທິພາບດ້ານຄ່າໃຊ້ຈ່າຍທີ່ເຫມາະສົມສໍາລັບສະຖາບັນການຄົ້ນຄວ້າວິທະຍາສາດ, ການກໍ່ສ້າງໂລຫະ, ອຸດສາຫະກໍາປ້ອງກັນຊາດແລະການທະຫານ, ມະຫາວິທະຍາໄລ, ການຜະລິດເຄື່ອງຈັກ, ການຂົນສົ່ງແລະອຸດສາຫະກໍາອື່ນໆ.
ຂໍ້ມູນຈໍາເພາະ
| ຕົວແບບ | PWS-25KN | PWS-100KN |
| ແຮງທົດສອບສູງສຸດ | 25kN | 100kN |
| ທົດສອບລະຫັດການແກ້ໄຂຜົນບັງຄັບໃຊ້ | 1/180000 | |
| ທົດສອບຄວາມຖືກຕ້ອງຂອງຕົວຊີ້ວັດຜົນບັງຄັບໃຊ້ | ພາຍໃນ ±0.5% | |
| ໄລຍະການວັດແທກການເຄື່ອນຍ້າຍ | 0~150(±75)(ມມ) | |
| ອົງປະກອບການວັດແທກການເຄື່ອນຍ້າຍ | 0.001ມມ | |
| ຄວາມຜິດພາດທີ່ກ່ຽວຂ້ອງຂອງຄ່າຕົວຊີ້ບອກການວັດແທກການເຄື່ອນຍ້າຍ | ພາຍໃນ ±0.5% | |
| ຄວາມຖີ່ຂອງການໄດ້ມາ | 0.01 ຫາ 100Hz | |
| ຄວາມຖີ່ການທົດສອບມາດຕະຖານ | 0.01-50Hz | |
| ທົດສອບຮູບແບບຄື້ນ | ຄື້ນຊີນ, ຄື້ນສາມຫຼ່ຽມ, ຄື້ນສີ່ຫຼ່ຽມ, ຄື້ນເຄິ່ງຊີນ, ຄື້ນເຄິ່ງໂຄຊິນ, ຄື້ນສາມຫຼ່ຽມເຄິ່ງ, ຄື້ນເຄິ່ງສີ່ຫຼ່ຽມ, ແລະອື່ນໆ. | |
| ພື້ນທີ່ທົດສອບ (ບໍ່ມີ fixture) mm | 1600 (ສາມາດປັບແຕ່ງໄດ້) | |
| ພາຍໃນປະສິດທິພາບ width mm | 650 (ສາມາດປັບແຕ່ງໄດ້) | |
ມາດຕະຖານ
1) GB/T 2611-2007 "ຄວາມຕ້ອງການດ້ານວິຊາການທົ່ວໄປສໍາລັບເຄື່ອງທົດສອບ"
2) GB/T16825.1-2008 "ການກວດກາເຄື່ອງທົດສອບ Static Uniaxial Testing Part 1: ການກວດກາ ແລະ calibration ລະບົບການວັດແທກແຮງດັນ ແລະ (ຫຼື) ເຄື່ອງທົດສອບການບີບອັດ"
3) GB/T 16826-2008 "ເຄື່ອງທົດສອບລະບົບໄຟຟ້າ-ໄຮໂດຼລິກ Servo Universal"
4) JB/T 8612-1997 "ເຄື່ອງທົດສອບລະບົບໄຟຟ້າ-ໄຮໂດຼລິກ Servo Universal"
5) JB9397-2002 "ເງື່ອນໄຂດ້ານວິຊາການຂອງເຄື່ອງທົດສອບຄວາມເຄັ່ງຕຶງແລະການບີບອັດຄວາມເມື່ອຍລ້າ"
6) GB/T 3075-2008 "Metal Axial Fatigue Method"
7) GB/T15248-2008 "Axial Constant Amplitude Low Cycle Fatigue Test Method ສໍາລັບວັດສະດຸໂລຫະ"
8) GB/T21143-2007 "ວິທີການທົດສອບເຄື່ອງແບບສໍາລັບຄວາມທົນທານຂອງກະດູກຫັກເຄິ່ງສະຖິດຂອງວັດສະດຸໂລຫະ"
9) HG/T 2067-1991 ເຄື່ອງທົດສອບຄວາມເມື່ອຍລ້າຢາງພາລາ ເງື່ອນໄຂດ້ານວິຊາການ
10) ASTM E466 ການທົດສອບມາດຕະຖານຂອງ Kic ສໍາລັບ Linear Elastic Plane Strain Fracture ຄວາມທົນທານຂອງວັດສະດຸໂລຫະ
11) ມາດຕະຖານການທົດສອບ ASTM E1820 2001 JIC ສໍາລັບການວັດແທກຄວາມທົນທານຂອງກະດູກຫັກ.
ຄຸນນະສົມບັດທີ່ສໍາຄັນ
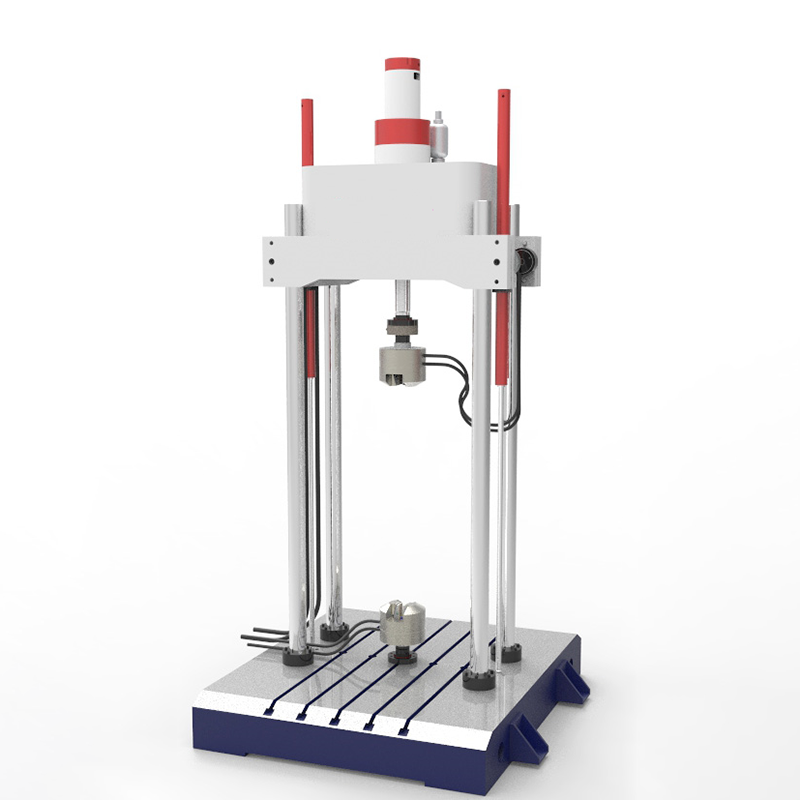
1 ເຈົ້າພາບ:ເຈົ້າພາບແມ່ນປະກອບດ້ວຍກອບການໂຫຼດ, ການປະກອບຕົວກະຕຸ້ນຕາມແກນທີ່ຕິດຢູ່ດ້ານເທິງ, ແຫຼ່ງນ້ໍາມັນ servo ໄຮໂດຼລິກ, ລະບົບການວັດແທກແລະການຄວບຄຸມ, ແລະອຸປະກອນເສີມໃນການທົດສອບ.
2 ກອບການໂຫຼດເຈົ້າພາບ:
ກອບການໂຫຼດຂອງເຄື່ອງຈັກຕົ້ນຕໍແມ່ນປະກອບດ້ວຍສີ່ uprights, beams ເຄື່ອນທີ່ແລະ workbench ເພື່ອສ້າງກອບການໂຫຼດປິດ.ໂຄງປະກອບການກະທັດລັດ, rigidity ສູງແລະການຕອບສະຫນອງການເຄື່ອນໄຫວໄວ.
2.1 ຄວາມອາດສາມາດຂອງລູກປືນແກນ: ≥± 100kN;
2.2 beam ເຄື່ອນທີ່: ຍົກໄຮໂດຼລິກ, locking hydraulic;
2.3 ພື້ນທີ່ທົດສອບ: 650×1600mm;
2.4 ເຊັນເຊີໂຫຼດ: (Qianli)
2.4.1 ເຊັນເຊີສະເພາະ: 100kN
2.4.2 Sensor linearity: ±0.1%;
2.4.3 Sensor overload: 150%.
3 Hydraulic servo axial axial actuator:
3.1 ການປະກອບຕົວກະຕຸ້ນ
3.1.1 ໂຄງສ້າງ: ຮັບຮອງເອົາການອອກແບບປະສົມປະສານຂອງ servo actuator, servo valve, load sensor, displacement sensor, ແລະອື່ນໆ.
3.1.2 ຄຸນສົມບັດ: ການຕິດຕັ້ງພື້ນຖານແບບປະສົມປະສານເຮັດໃຫ້ລະບົບຕ່ອງໂສ້ການໂຫຼດສັ້ນລົງ, ປັບປຸງຄວາມເຂັ້ມງວດຂອງລະບົບ, ແລະມີຄວາມຕ້ານທານກັບຜົນບັງຄັບໃຊ້ດ້ານຂ້າງທີ່ດີ.
3.1.3 ຄວາມຖີ່ຂອງການຊື້: 0.01~100Hz (ຄວາມຖີ່ການທົດສອບໂດຍທົ່ວໄປບໍ່ເກີນ 70Hz);
3.1.4 ການຕັ້ງຄ່າ:
ກ.Linear actuator: 1
I. ໂຄງສ້າງ: double rod double acting ໂຄງປະກອບການ symmetrical;
II.ຜົນບັງຄັບໃຊ້ການທົດສອບສູງສຸດ: 100 kN;
III.ລະດັບຄວາມກົດດັນການເຮັດວຽກ: 21Mpa;
IV.Piston stroke: ± 75mm;ຫມາຍເຫດ: ກໍານົດເຂດ buffer ໄຮໂດຼລິກ;
ຂ.ປ່ຽງ servo ໄຟຟ້າ-ໄຮໂດຼລິກ: (ຍີ່ຫໍ້ນໍາເຂົ້າ)
I. ແບບ: G761
II.ການໄຫຼຄະແນນ: 46 ລິດ / ນາທີ 1 ຊິ້ນ
III.ຄວາມກົດດັນການຈັດອັນດັບ: 21Mpa
IV.ຄວາມກົດດັນການເຮັດວຽກ: 0.5~31.5 Mpa
ຄ.ເຊັນເຊີການເຄື່ອນທີ່ magnetostrictive ຫນຶ່ງ
I. ຕົວແບບ: ຊຸດ HR
II.ໄລຍະການວັດແທກ: ± 75mm
III.ຄວາມລະອຽດ: 1um
IV.ຄວາມບໍ່ມີເສັ້ນຊື່: <±0.01% ຂອງຂະໜາດເຕັມ>
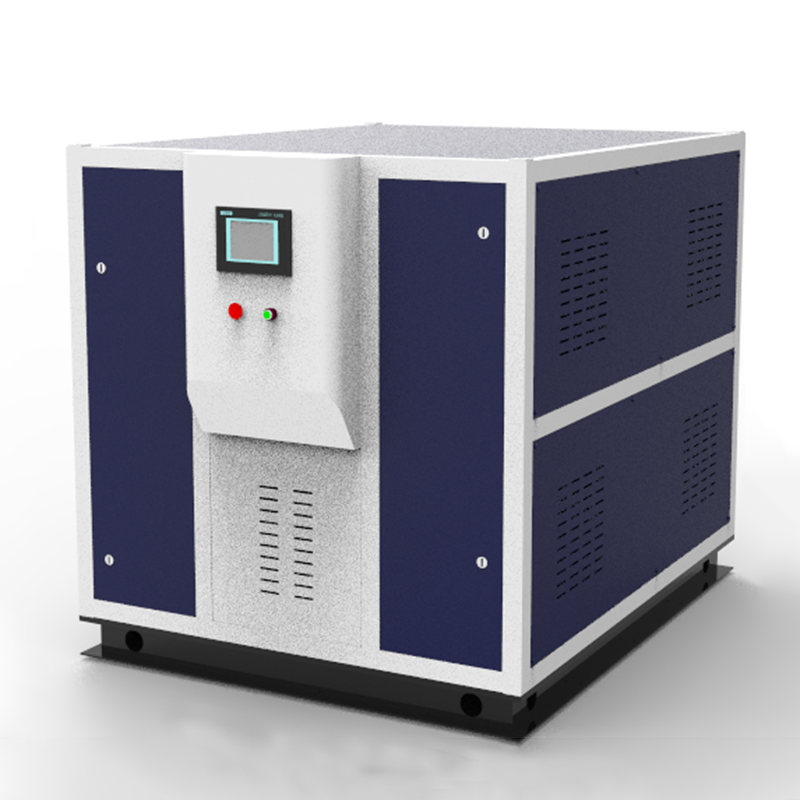
4 Hydraulic servo ແຫຼ່ງນ້ໍາມັນຄວາມກົດດັນຄົງທີ່
ສະຖານີສູບນ້ໍາແມ່ນສະຖານີສູບນ້ໍາມາດຕະຖານທີ່ມີການອອກແບບໂມດູນ.ໃນທາງທິດສະດີ, ມັນສາມາດຖືກໂຍນເຂົ້າໄປໃນສະຖານີສູບນ້ໍາຂະຫນາດໃຫຍ່ທີ່ມີການໄຫຼໃດໆ, ດັ່ງນັ້ນມັນມີຂະຫນາດທີ່ດີແລະການນໍາໃຊ້ທີ່ມີຄວາມຍືດຫຍຸ່ນ.
l·ການໄຫຼທັງຫມົດ 46L / ນາທີ, ຄວາມກົດດັນ 21Mpa.(ປັບຕາມຄວາມຕ້ອງການທົດລອງ)
l·ພະລັງງານທັງຫມົດແມ່ນ 22kW, 380V, ສາມເຟດ, 50hz, AC.
l ·ສະຖານີສູບໄດ້ຖືກອອກແບບແລະຜະລິດຕາມການອອກແບບ modular ມາດຕະຖານ, ມີເຕັກໂນໂລຊີແກ່ແລະປະສິດທິພາບທີ່ຫມັ້ນຄົງ;ມັນໄດ້ຖືກຕິດຕັ້ງດ້ວຍໂມດູນ stabilizing ແຮງດັນ relay, ເຊິ່ງເຊື່ອມຕໍ່ກັບຕົວກະຕຸ້ນ.
l ·ສະຖານີສູບນ້ໍາປະກອບດ້ວຍປໍ້ານໍ້າມັນ, ມໍເຕີ, ກຸ່ມປ່ຽງສະຫຼັບຄວາມກົດດັນສູງແລະຕ່ໍາ, ສະສົມ, ການກັ່ນຕອງນ້ໍາມັນ, ຖັງນ້ໍາມັນ, ລະບົບທໍ່ແລະພາກສ່ວນອື່ນໆ;
l·ລະບົບການຕອງຮັບຮອງເອົາສາມຂັ້ນຕອນຂອງການກອງ: ຮູປອດດູດນ້ໍາມັນ, 100μ;ແຫຼ່ງນ້ໍາມັນ, ຄວາມຖືກຕ້ອງຂອງການກັ່ນຕອງ 3μ;ໂມດູນຄວບຄຸມແຮງດັນ Relay, ຄວາມຖືກຕ້ອງຂອງການກັ່ນຕອງ 3μ.
l·ປໍ້ານໍ້າມັນໄດ້ຖືກເລືອກຈາກເຄື່ອງປ້ຳເກຍພາຍໃນ Telford ຂອງເຢຍລະມັນ, ເຊິ່ງນຳໃຊ້ລະບົບສາຍສົ່ງຕາໜ່າງເກຍພາຍໃນ, ມີສຽງລົບກວນຕໍ່າ, ຄວາມທົນທານດີເລີດ ແລະ ຊີວິດຍາວ;
l· ໜ່ວຍມໍເຕີປ້ຳນ້ຳມັນມີອຸປະກອນປ້ອງກັນຄວາມຊຸ່ມຊື່ນ (ເລືອກແຜ່ນປຽກ) ເພື່ອຫຼຸດຜ່ອນການສັ່ນສະເທືອນ ແລະ ສຽງດັງ;
l·ໃຊ້ກຸ່ມປ່ຽງປ່ຽງຄວາມກົດດັນສູງແລະຕ່ໍາເພື່ອເລີ່ມຕົ້ນແລະຢຸດລະບົບໄຮໂດຼລິກ.
l ·ຖັງນໍ້າມັນເຊື້ອໄຟ servo ມາດຕະຖານທີ່ປິດລ້ອມຢ່າງສົມບູນ, ປະລິມານຂອງຖັງນໍ້າມັນເຊື້ອໄຟແມ່ນບໍ່ຫນ້ອຍກວ່າ 260L;ມັນມີຫນ້າທີ່ຂອງການວັດແທກອຸນຫະພູມ, ການກັ່ນຕອງອາກາດ, ການສະແດງລະດັບນ້ໍາມັນ, ແລະອື່ນໆ;
l·ອັດຕາການໄຫຼ: 40L / ນາທີ, 21Mpa
5. 5 ບັງຄັບໃຫ້ເພີ່ມສະເພາະ (ທາງເລືອກ)
5.5.1 ໄຮໂດຼລິກບີບບັງຄັບ chuck.ຊຸດ;
l·ການບີບບັງຄັບດ້ວຍໄຮໂດຼລິກ, ຄວາມກົດດັນການເຮັດວຽກ 21Mpa, ຕອບສະຫນອງຄວາມຕ້ອງການຂອງການທົດສອບຄວາມເຫນື່ອຍລ້າຄວາມຖີ່ສູງແລະຕ່ໍາຂອງຄວາມກົດດັນວັດສະດຸແລະການບີບອັດຢູ່ທີ່ສູນຂ້າມ.
l ·ຄວາມກົດດັນການເຮັດວຽກສາມາດປັບໄດ້, ລະດັບການປັບແມ່ນ 1MP-21Mpa;
l·ໂຄງສ້າງເປີດ, ງ່າຍທີ່ຈະທົດແທນຄາງກະໄຕ.
l·ດ້ວຍຫມາກແຫ້ງເປືອກແຂງທີ່ລັອກດ້ວຍຕົນເອງ, ເຊື່ອມຕໍ່ເຊັນເຊີການໂຫຼດຢູ່ສ່ວນເທິງຂອງເຄື່ອງຈັກຕົ້ນຕໍແລະລູກສູບຂອງຕົວກະຕຸ້ນຕ່ໍາ.
l· Clamping ຄາງກະໄຕສໍາລັບຕົວຢ່າງຮອບ: 2 ຊຸດ;clamping jaws ສໍາລັບຕົວຢ່າງແປ: 2 ຊຸດ;(ຂະຫຍາຍໄດ້)
5.5.2 ຊຸດໜຶ່ງຂອງເຄື່ອງຊ່ວຍສຳລັບການທົດສອບການບີບອັດ ແລະ ການງໍ:
l·ຫນຶ່ງຊຸດຂອງແຜ່ນຄວາມກົດດັນທີ່ມີເສັ້ນຜ່າກາງφ80mm
l·ຊຸດຂອງເຄື່ອງຊ່ວຍງໍສາມຈຸດສໍາລັບການທົດສອບຄວາມເມື່ອຍລ້າການຂະຫຍາຍຕົວຂອງຮອຍແຕກ.