



ຄໍາຮ້ອງສະຫມັກ
ເຄື່ອງທົດສອບການທົດສອບຄວາມອິດເມື່ອຍໃນໂລກສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການທົດລອງໃຊ້ຊີວິດຊອືດແລະລົດຈັກລໍ້, ລົດຍົນ, ແລະລົດຍົນອື່ນໆ. ການແຂ່ງຂັນພິເສດຍັງສາມາດເຮັດໃຫ້ເຫມາະສົມກັບການທົດສອບຄວາມອ້ວນຂອງຕົວຢ່າງພິເສດ.
ເຄື່ອງທົດສອບທີ່ເຮັດໃຫ້ໂມດຣັສຊັ້ນສູງທີ່ຄວບຄຸມ microcomupe ແມ່ນມີຄວາມລະອຽດສູງ, ເຄື່ອງຈັກທົດສອບຄວາມອ່ອນແອສູງ ວິທີການເຕັກໂນໂລຢີ.
ຂໍ້ມູນສະເພາະ
| ຊື່ | ການສະເພາະ | ||
| 1 | ກໍາລັງທົດສອບສູງສຸດ | 20kn | |
| 2 | ຈໍານວນສະຖານີທົດສອບ | 1 | |
| 3 | ຄວາມຖີ່ຂອງການທົດສອບ | 0.5 ~ 5hz | |
| 4 | ຄວາມຖີ່ຂອງການສະແດງຄວາມຖີ່ | 0.1 hz | |
| 5 | ຍະພາບ | ± 50mm | |
| 7 | ຄວາມສາມາດສູງສຸດຂອງວຽກງານຕ້ານການ | 1 ພັນລ້ານເທື່ອ | |
| 8 | ການນັບຄວາມຖືກຕ້ອງຂອງການຢຸດເຊົາການ | ± 1 | |
| 9 | ເສັ້ນຜ່າສູນກາງສູງສຸດຂອງສິ້ນທົດສອບ | φ90mm | |
| 12 | ແຮງດັນໄຟຟ້າພະລັງງານ (ລະບົບ 4 ເສັ້ນສາມເສັ້ນ) | 380vac 50hz | |
| 13 | ພະລັງງານມໍເຕີ | 7.5 ກິໂລ | |
| 14 | ຂະຫນາດ | ເຈົ້າພາບ | 1200 * 800 * 2100 (h) |
| ກ່ອງຄວບຄຸມ | 700 * 650 * 1450 | ||
| 15 | ນ້ໍາຫນັກ | 450kg | |
ລັກສະນະທີ່ສໍາຄັນ
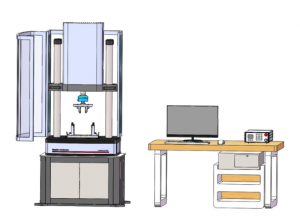
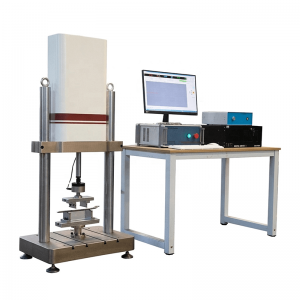
1.1 ເຈົ້າພາບ:ເຈົ້າພາບສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍກອບ, ກົນໄກການໂຫຼດກົນຈັກ, ກົນໄກການສົ່ງຕໍ່, ແລະເຄື່ອງສໍາອາງ. ກອບແມ່ນປະກອບດ້ວຍຖັນ, ຕູ້ຄອນເທນເນີ, ເວທີທີ່ຫນ້າຕື່ນເຕັ້ນ, ເປັນທ່ອນໄມ້ເທິງ, ກົນໄກຍົກ screw, ຖານແລະສ່ວນອື່ນໆ. ຖັນ, Workbench, ເວທີທີ່ຫນ້າຕື່ນຕາຕື່ນໃຈ, ເປັນທ່ອນໄມ້ເທິງ, ແລະກົນໄກຍົກລະບົບສະກູຖືກຕິດຕັ້ງພ້ອມກັນແລະຕິດຕັ້ງໂດຍສະເພາະຢູ່ເທິງຖານ; ເຄື່ອງດູດຊ shock ອກທີ່ຖືກທົດສອບແມ່ນຖືກຕິດຕັ້ງລະຫວ່າງຕາຕະລາງທີ່ຫນ້າຕື່ນເຕັ້ນແລະຂະຫນາດທີ່ມີຂະຫນາດທີ່ແຕກຕ່າງກັນ, ແລະຊຸດທົດສອບຂອງວິທີການຕິດຕັ້ງທີ່ແຕກຕ່າງກັນ ອຸປະກອນເສີມ. ຄວາມຕ້ອງການ.
1.2 ການໂຫຼດກົນໄກ:ມັນແມ່ນໂຄງສ້າງກົນຈັກ, ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍກົນໄກການເຊື່ອມຕໍ່ Crank, ເຊິ່ງປ່ຽນການເຄື່ອນໄຫວຂອງມໍເຕີຂອງມໍເຕີໃຫ້ເປັນການເຄື່ອນໄຫວທີ່ບໍ່ມີສາຍ. ໂດຍການດັດປັບຄວາມແປກປະຫລາດຂອງແຖບເລື່ອນ, ໄລຍະທາງ Motion ທີ່ຕອບສະຫນອງໄດ້ສາມາດປັບໄດ້ກັບເສັ້ນເລືອດຕັນໃນການທົດສອບທີ່ຕ້ອງການໂດຍສິ້ນທົດສອບ.
1.3 ລະບົບສາຍສົ່ງ:ກົນໄກການສົ່ງຕໍ່ແມ່ນປະກອບດ້ວຍມໍເຕີ asynchronous ສາມໄລຍະແລະ flywheel. ຄວາມໄວຂອງມໍເຕີ້ສາມາດປັບໄດ້ໂດຍຄວາມຖີ່ຂອງຄວາມຖີ່, ເພື່ອໃຫ້ຄວາມຖີ່ຂອງການທົດສອບສາມາດປັບຕົວໂດຍຕັດສິນໄດ້ພາຍໃນລະດັບ 0.5 ຫາ 5 hz.
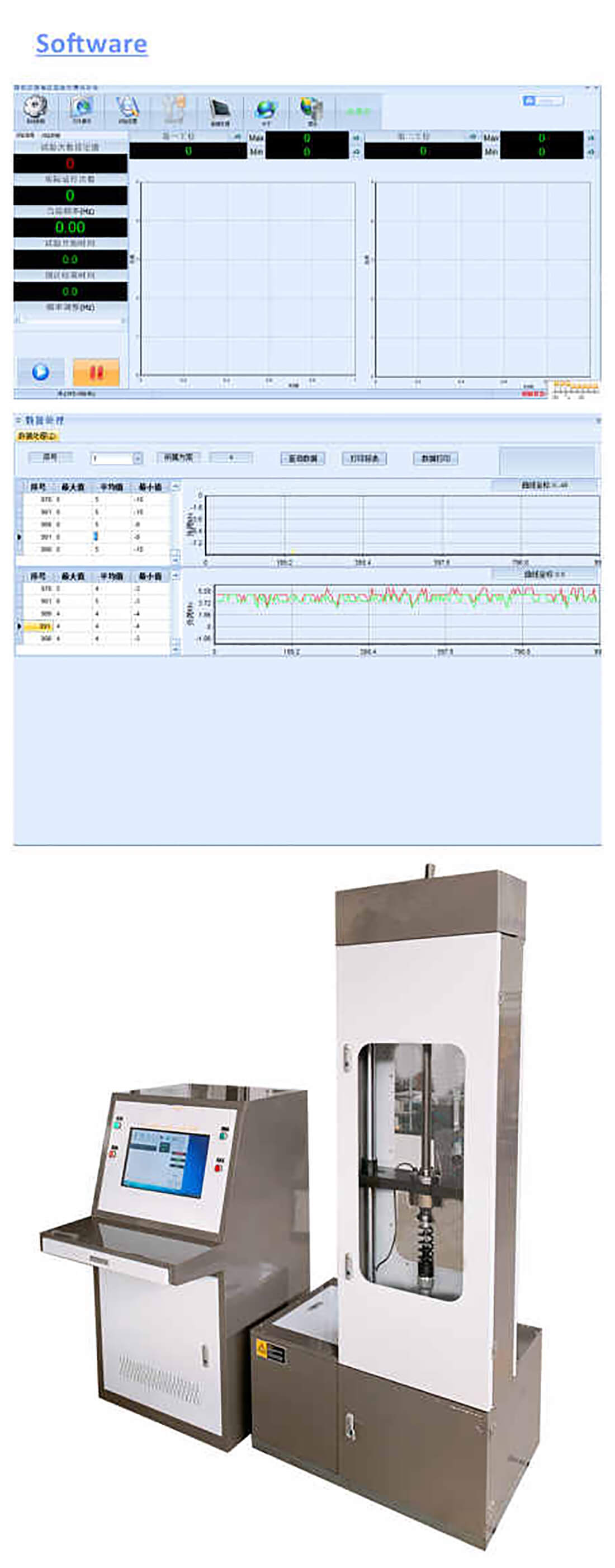
1.4 ລະບົບຄວບຄຸມ:ລະບົບການວັດແທກຄອມພິວເຕີແລະຄວບຄຸມໄດ້ຖືກພັດທະນາຢ່າງເປັນອິດສະຫຼະແລະຜະລິດໂດຍບໍລິສັດຂອງພວກເຮົາ. ມັນມີຫນ້າທີ່ຄວາມຈໍາ, ນັ້ນແມ່ນ, ຂໍ້ມູນການທົດສອບປະຫວັດສາດສາມາດເຂົ້າເຖິງໄດ້ທຸກເວລາ. ລະບົບການວັດແທກແລະຄວບຄຸມແມ່ນສູນກາງຂອງອຸປະກອນທົດສອບ. ໃນດ້ານຫນຶ່ງ, ຄອມພີວເຕີ້ລວບລວມເຄື່ອງມືການທົດສອບຂອງແຕ່ລະເຄື່ອງມືໃນເວລາທົດສອບ, ແລະສະແດງຄວາມຖີ່ຂອງການທົດສອບ, ເວລາທົດສອບປັດຈຸບັນ, ແຕ່ລະບ່ອນເຮັດວຽກແລະເສັ້ນໂຄ້ງເວລາ , ທົດສອບຄວາມອົດທົນ, ແລະອື່ນໆ. ສົ່ງສັນຍານຄວບຄຸມ, ແລະຜູ້ຄວບຄຸມປະຈຸບັນທີ່ເຂັ້ມແຂງຄວບຄຸມເຄື່ອງຈັກທີ່ມີການປັບຕົວຂອງສະຖານທີ່ປັບພື້ນທີ່ເທິງໃນລະຫວ່າງການທົດສອບ, ແລະປົກປ້ອງອຸປະກອນແລະເຄື່ອງປະດັບ ຄວາມປອດໄພ, ດັ່ງທີ່ສະແດງໃນຮູບ:
1.5 ການແນະນໍາການເຮັດວຽກຂອງ Software
1.5.1 ຈໍານວນການທົດສອບສາມາດກໍານົດໄດ້. ຈໍານວນເວລາສູງສຸດຂອງເວລາແມ່ນ 1 ພັນລ້ານເທື່ອ.
1.5.2 ຈໍານວນການທົດສອບໄປຮອດເລກກໍານົດ, ແລະເຄື່ອງທົດສອບຖືກຄວບຄຸມເພື່ອຢຸດການທົດສອບ.
1.5.3 ລະບົບຊອບແວທົດສອບສະແດງຄວາມຖີ່ຂອງການທົດສອບແລະຈໍານວນການທົດສອບຜ່ານຄອມພີວເຕີ້ແລະຕັດສິນການພັກຜ່ອນແລະການປິດການພັກຜ່ອນ.
1.5.4 ມັນມີຫນ້າທີ່ຂອງການປິດອັດຕະໂນມັດໃນເວລາທີ່ເຄື່ອງດູດຊ້ໍາໄດ້ຮັບຄວາມເສຍຫາຍຢູ່ສະຖານີໃດກໍ່ຕາມແລະຫນ້າທີ່ຂອງການທົດສອບສູງສຸດຂອງເຄື່ອງດູດຊ shock ອກແມ່ນ attenuated ກັບການໂຫຼດທີ່ລະບຸ.
1.5.5 ມັນມີຫນ້າທີ່ການສະແດງເວລາທີ່ແທ້ຈິງຂອງການທົດສອບທີ່ໃຊ້ເວລາຂອງການທົດສອບຄວາມຕົກໃຈ, ແລະບັນທຶກຂໍ້ມູນການເອົາຊະນະຄວາມຫຍຸ້ງຍາກຂອງການເກັບກ່ຽວໃນໄລຍະເວລາການທົດສອບໂດຍແຜນການ.
1.6 ລັກສະນະຕົ້ນຕໍແມ່ນດັ່ງຕໍ່ໄປນີ້:
1.6.1 ຄວາມກວ້າງຂວາງແລະຄວາມຖີ່ສາມາດປັບປ່ຽນໄດ້ຢ່າງເສລີ.
1.6.2 ຈໍສະແດງຜົນດິຈິຕອນຂອງເວລາສັ່ນສະເທືອນແລະຄວາມຖີ່.
1.6.3 ການປິດອັດຕະໂນມັດຂອງເວລາທົດສອບ Preset, ປະສິດທິພາບສູງ.
1.6.4 ການທົດສອບຂອງເຄື່ອງດູດຊ shock ອກຄູ່ຫນຶ່ງສາມາດເຮັດໄດ້, ຫຼືການທົດສອບເຄື່ອງດູດຊ shock ອກຫຼາຍຄູ່ສາມາດປະຕິບັດໄດ້.
1.6.6 ຈໍານວນການປິດທີ່ກໍານົດໄວ້ລ່ວງຫນ້າສາມາດໃຊ້ສໍາລັບການທົດສອບທີ່ບໍ່ໄດ້ລະບຸ;
1.6.7 ມີການທົດສອບການທົດສອບການຕິດຕັ້ງ screw ຮູສະກູ;
1.6.8 ຕິດຕັ້ງດ້ວຍເຄື່ອງມືປັບຂະຫນາດໃຫຍ່, ເຊິ່ງສະດວກສໍາລັບການປັບຄວາມກວ້າງ;
ຜະລິດຕະພັນປະເພດ
-
ເຄື່ອງຈັກທົດສອບຄວາມອິດເມື່ອຍດ້ານອີເລັກໂທຣນິກ
-

ໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກໂຣກປອດໂຣກປອດເຫລືອງ
-

ເຄື່ອງຈັກທົດສອບຄວາມເມື່ອຍລ້າກົນຈັກ
-

PWS-100D Electro-frodraulic Servo Servo ແລະ St ...
-

ເຄື່ອງຈັກທົດສອບຄວາມອ້ວນ Torsional
-
DPS-2020pl01 ແບບແຜນທໍລະນີຊີວິດໂຣກຊີວະພາບ DPS-2020pl01 ແບບຍືນຍົງ t ...